
Nonebot beta1 教程
Nonebot2 在更新到 beta1 版本后许多地方和 alpha16 版本有许多差异,包括但不限于适配器、依赖的更改。
开始本教程前,需要知道该教程:
- Python 版本 ≥ 3.7
- 基于 Windows 10 版本(Win11 也可以但我只能说快逃)
- 使用了 pip 用于安装
- 使用了脚手架 nb-cli
- 使用了 onebot.v11 适配器
创建项目之前
在创建机器人项目前需要安装:
而这些都会讲到,已经安装过了的建议 空降。
下载 Python
-
进入 Python 官网。
-
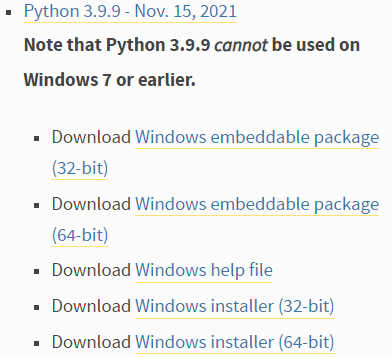
选择 3.7.3 版本以上的进行下载。
-
我的 Python 版本是 3.9.9,选择上图中的 Windows installer(64-bit) 进行下载。
-
下载完成后点进 python-3.9.9-amd64.exe,勾选 Add Python 3.9 to PATH 后点击 Install Now。
当然,你也可以自定义路径,但一定要勾选 PATH。
-
等待下载……
下载完毕后开个 CMD 输入
python --version,出现Python 3.9.9就代表能用了。
安装 pip
pip 是 Python 包管理工具,用来下载 Python 的包。
-
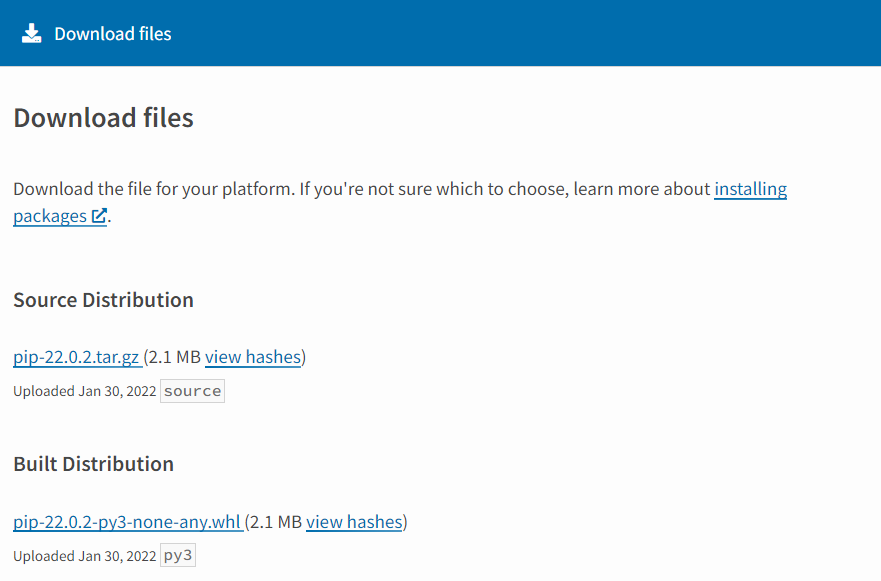
进入 PyPI,选择最新版本的 pip。
-
选择 Download Files,下载 pip-22.0.2.tar.gz 进行解压。

-
解压后进入文件夹内,右键空白处打开 CMD,输入
python setup.py install -
等待安装……
安装完成后开个 CMD 输入pip --version,出现pip 22.0.2 from 路径……时就代表能用了。
安装 nb-cli
Nonebot2 提供了相当便利的工具 nb-cli,安装它也会直接安装 nonebot 2.0.0-beta1。
-
开个 CMD 输入
pip install nb-cli -
出现
Successfully installed nb-cli……就代表 pip 安装 nb-cli 成功了。
下载 go-cqhttp
做机器人只有 Nonebot2 是不足够的,Nonebot2 仅能做到处理机器人上报的事件。
机器人的实际工作流程为:
- 协议端 上报数据给 后端驱动;
- 后端驱动 将原始数据转交给 协议适配 处理;
- 协议适配,或称为 bot,将数据转化为 event 转交给 Nonebot2;
- Nonebot2 处理 event。
很显然,我们只有处理 event 的 Nonebot2。
获取数据的工作便交到了 go-cqhttp 身上:它相当于你的另一个 QQ,接收到信息后便转交到 Nonebot2 手上等着处理完和发送。
-
进入 go-cqhttp 仓库,下载最新版本的 releases。
-
选择 go-cqhttp_windows_amd64.exe 进行下载和备用。
创建项目
现在该下的都下载完了,是时候创建机器人项目了:
新建项目
-
新建一个文件夹,右键打开 CMD,输入
nb create。 -
Project Name:,输入你想给你机器人取的名字。 -
Where to store the plugin?,这意味着机器人插件的存放路径,建议选择In a "src" folder。 -
Which builtin plugin(s)……巴拉巴拉,这就是在问你你的机器人要不要 Nonebot2 内嵌的插件,建议只选择echo插件。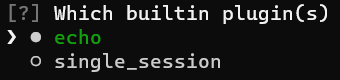
需要注意的是,选择内嵌插件时要按下空格再回车继续。
-
Which adapter(s)……巴拉巴拉,选择你想要的协议适配,这里要选择OneBot V11,别忘了空格再回车。 -
期间会进行适配器等的安装,结束后你的文件夹内便会出现机器人名字的文件夹,差不多长这样:
plaintext1
2
3
4
5
6
7
8
9
10
11
12机器人名字
├── src
│ └── plugins
├── .env
├── .env.dev
├── .env.prod
├── .gitignore
├── bot.py
├── docker-compose.yml
├── Dockerfile
├── pyproject.toml
└── README.md
src/plugins为 Nonebot2 插件存放处,插件则是 Nonebot2 的核心,可以实现模块化、功能扩展等.env.*等文件是项目的配置文件,内存有变量ENVIRONMENT,是 Nonebot2 启动时就会寻找的系统环境变量.gitignore,如果不上传到 git 仓库的话可以无视bot.py是是启动 Nonebot2 时默认的入口文件pyproject.toml是项目插件配置文件Dockerfile和docker-compose.yml皆为 Docker 镜像配置文件
配置项目
.env 文件是基础的环境配置文件,不管是什么环境都会被加载,不过还是会被 .env.{环境} 文件所覆盖。
而环境有:
- 开发环境 development 或 dev
- 生产环境 production 或 prod
等等等等,就不一一列举了。
-
打开
.env文件写入:ENVIRONMENT=dev。
开发环境将会报告错误日志,这也会将环境变量的加载导向.env.dev文件。 -
打开
.env.dev文件,写入以下配置:plaintext1
2
3
4
5
6HOST=127.0.0.1
PORT=xxxx
SUPERUSERS=["xxxxx"]
NICKNAME=["xxx"]
COMMAND_START=["/",""]
COMMAND_SEP=["x"]- 其中,
HOST为 Nonebot2 监听的 IP /主机名 PORT为监听的端口,这里可以随意选择一个四位数SUPERUSERS为超级用户,后面会说作用。值是一个 QQ 号,建议使用大号NICKNAME为机器人的昵称COMMAND_START为命令起始字符,后面会说作用,这里先用 "/"COMMAND_SEP为命令分割字符
- 其中,
-
第 2 步完成后对 Nonebot2 的基础配置就完成了,但我们还未配置 go-cqhttp。
再新建一个文件夹,里边存放我们之前下载的 go-cqhttp_windows_amd64.exe,同时我建议将该 exe 文件重命名为 go-cqhttp.exe。
-
新建一个
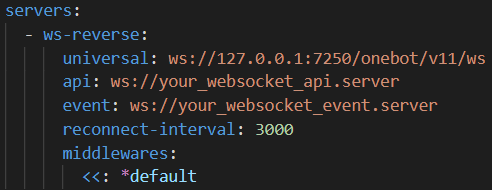
config.yml文件,作为 go-cqhttp 的配置文件。- 配置信息前往 go-cqhttp 文档 内进行复制粘贴
servers下面选择ws-reverse,如下图
-
修改配置信息:
account下的uin需要填写机器人所用的 QQ 账号password需要填写 QQ 账号的密码servers下的port需要填写配置 Nonebot2 时填写的四位数 PORT
-
启动 go-cqhttp.exe。百分百会弹出生成。bat 文件的窗口,直接关闭后会发现文件夹内多出了一个 go-cqhttp.bat,以后启动 go-cqhttp 都需要用到这个文件。
启动后 go-cqhttp 会进行登录,出现
[INFO]: アトリは、高性能ですから!时便是登陆成功,要开始连接到 Nonebot2 了。因为我们 Nonebot2 还未开启,此时的 go-cqhttp 只会一直弹出黄色的连接失败。
用下机器人
一切准备成功,机器人已经可以使用了!
使用机器人时,Nonebot2 和 go-cqhttp 都需要 一直开启。对于不想长期开着电脑的小伙伴,建议使用云服务器。
-
打开存放 bot.py 的文件夹,右键开启 CMD,输入
nb run。 -
打开存放 go-cqhttp.bat 的文件夹,左键打开。
-
等待第 1 步的 CMD 出现了
plaintext1
2[INFO] nonebot | OneBot V11 | Bot QQ账号 connected
[INFO] websockets | connection open便意味着机器人可以使用了。
-
快马加鞭通过大号给机器人账号发送
/echo 喵
这边是因为我的机器人命令起始字符为 "hoka",你也可以修改成自己喜欢的
-
机器人一旦复读了,便真正的代表着,你成功的搭建了一个 QQ 机器人。
好了,现在新手教程结束了,来试试这些插件吧。jpg
深入插件
咳咳,恭喜你获得了一个刚出生的 QQ 机器人!但它九年义务教育还未完成……
对于一个功能完善的机器人而言,完善的插件系统 是不可缺少的。
我们接下来的才是 Nonebot2 的重头戏:插件讲解。
什么是插件
仔细读的都知道,插件是 Nonebot2 的核心。插件既可以是一个模块,也可以是一个包。
插件的存放路径是 src/plugins,在这个路径下,任何 .py 文件 或 有__init__.py 文件的文件夹 都算为插件。
插件名称不可以重复。
多说不如少做,瞅一眼 插件实例,说不定能够更理解插件的用处。
创建插件
-
在机器人文件夹里右键开启 CMD,输入
nb plugin create。 -
Project Name:,输入插件的名称 -
Where to store the plugin?,自处是询问插件存放的路径,选择src/plugins即可。 -
Do you want to load……巴拉巴拉。如果你想在你创建的这个插件里再套娃一个插件,就选y;反之就n。正常都是不用套娃。 -
没了,你的插件创建完成噜。
进入
src/plugins里边,就能看到插件名称的文件夹,里边分别躺着 init.py 和 config.py 文件。前者用于编写插件内容,相当于插件的入口文件;后者则是插件的配置文件。
其实直接在文件夹内新建也可以,就提一嘴。
用别人的插件
要是自己代码写不明白,岂不是永远都没法整一个机器人了?
没有的事。Nonebot2 具有一个专属的 商店,其包含了开源的
- 驱动器
- 适配器
- 插件
- 机器人
使用他人的插件很简易,方法也多,就是别忘了用了后给他们一个 STAR ~
pip 安装法:
-
举例:NoneBot 离线文档【nonebot_plugin_docs】
这个插件在加载后会输出一个可以 离线打开 的 Nonebot2 网址。
-
开个 CMD,输入
pip install nonebot_plugin_docs -
等待安装完成……
-
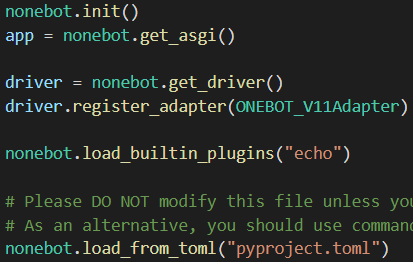
来到机器人文件夹下的 bot.py,找到上图这个位置。
nonebot.load_builtin_plugins("echo")意思便是 Nonebot2 加载了内嵌的 echo 插件,也就是我们之前试用机器人时用的 echo 功能。nonebot.load_from_toml("pyproject.toml")加载了配置内插件存放路径下所有的插件,也就是src/plugins。实际上,插件的加载也有前后之分。按照上图的顺序来说,机器人启动时都会事先加载 echo 插件,其次才是
src/plugins下的插件。 -
按照你想要的顺序,在 bot.py 里加入
nonebot.load_plugin("nonebot_plugin_docs")注意,一定要是
_,而不是-。 -
启动机器人,加载插件时应当会出现一句
[INFO] nonebot_plugin_docs | Nonebot docs will be running at: http://localhost:端口/website/有了便是加载成功,没有也没关系,必定会有一大串红红绿绿的错误日志等待着你。回头看看哪里疏漏,修复了就成。
脚手架安装法:
-
举例:定时任务【nonebot_plugin_apscheduler】
该插件为定时任务插件,使用方式见 其仓库。
-
进入有 pyproject.toml 的机器人文件夹内,右键开启 CMD,输入
nb plugin install nonebot_plugin_apscheduler
-
等待安装完成……
完成后便能在 pyproject.toml 里面发现多了一句
plugins = ["nonebot_plugin_apscheduler"]要是没有也没关系,还是那句话,一大串错误日志等待着你。看看哪里出了问题,修复了就成。
GitHub 下载法:
-
这个法子的好处是可以自行修改源代码,不过手要勤奋点了。
GitHub 账号如何注册这里就不写了。
喂明明连 Python 怎么安装都写了举例:Nonebot2 消息撤回插件【nonebot_plugin_withdraw】
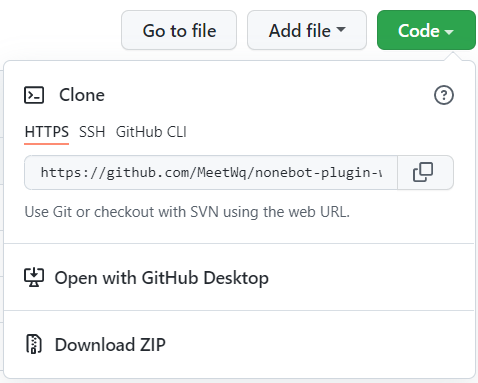
-
进入 其仓库,找到上图这个地方,选择 Download ZIP。
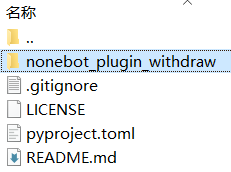
-
单单解压上图选中的这个文件夹在你的
src/plugins下。解压时如果出现同名文件夹套文件夹,将被套的文件夹移上一级即可。
-
启动机器人,出现
[SUCCESS] nonebot | Succeeded to import "nonebot_plugin_withdraw"这句便代表成功力。没有的话,错误日志。jpg
-
如果文件不是很多的话,可以直接复制粘贴文件内容。
事件响应器
事件响应器,或 Matcher,是响应接收到的事件的单元。
多说不如少做,我们来写一个 接收到 "hi" 这个词时就作出响应 的事件响应器吧。
-
定义辅助函数即可在插件内创建事件响应器。
不过事先我们得从 nonebot 主模块里导出辅助函数。
-
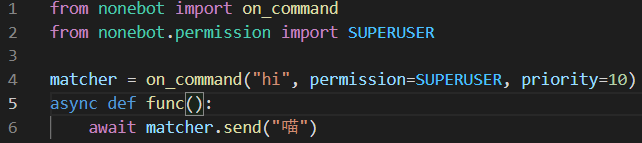
按照上边的教程,随便建立一个插件,进入其 init.py 文件,写入
from nonebot import on_commandon_command就是这里我们要用的辅助函数,它会创建命令消息事件响应器。因为我们要在接收到 "hi" 时就有响应,"hi" 就是这里的命令消息。
-
写入
from nonebot.permission import SUPERUSER该步骤实际为可选,SUPERUSER 我们在上边配置。env 文件时有提到过,即超级用户。
在 Nonebot2 中,超级用户就像是 QQ 群聊中的管理员,享受着高贵的特权。
被设置了超级用户权限的事件响应器 只会 对超级用户账号作出响应。

-
写入
matcher = on_command("hi", permission=SUPERUSER, priority=10)matcher在这里是事件响应器的名称,可以随便取,就是在同个文件里不能重名。"hi"指定了 "hi" 为命令消息,只有在接收到命令消息时机器人才会响应。permission=SUPERUSER设置了超级用户权限,只有在超级用户发送 "hi" 时机器人才会响应。priority=10定义了该事件响应器的优先级。优先级数字越小越先响应,以 1 开始。可以不填,这边提一嘴。和优先级一样可选的变量还有:匹配规则、阻断等等。
辅助函数大全可见 官方网址。
不过现在只是建立了一个 可以响应 的事件响应器,处理流程还没写呢。
处理流程
事件的处理流程由处理依赖组成,即 Dependent。
而装饰器能够装饰一个函数,让其自动转换为 Dependent 对象并加入事件响应器的处理流程中。
装饰器分为:
- handle;最基本的装饰器
- receive;在 handle 的基础上会中断当前事件处理流程,并等待一个新的事件
- got;和 receive 相似但用于接收消息,贴近于对话形式会话
由于我们的例子是 接收到 "hi" 这个词时就作出响应,这里用 handle 装饰器即可。
-
在事件响应器下面写入
@matcher.handle()matcher依旧是事件响应器的名称。这里的 handle 为装饰器。
-
写入
async def func():我们定义了一个名为 func 的函数,而在 handle 装饰器下,func 函数已经变成了 Dependent 对象。
-
在 QQ 里面,我们要如何才能知道发了 "hi" 后,机器人到底有没有作出响应?
我的建议是让机器人也发送什么,比如 "喵"。
在 func 函数内写入
await matcher.send("喵"),即这个名为 matcher 的事件响应器响应后发送了 "喵"。
到这里,处理流程也写好了,不过还是缺些什么才能作为一个可运作的插件。
插件实例
虽然处理流程写出模子来了,但问题也来了:这么写是 没法获取上下文信息 的。
获取上下文信息的重点就在 func 函数里,该函数需要从 Onebot.11 适配器里导出的 Bot 参数。
-
分别添加
from nonebot.params import Statefrom nonebot.typing import T_Statefrom nonebot.adapters.onebot.v11 import Bot, Event -
在 func 函数括号内添加
bot: Bot, event: Event, state: T_State = State()对于更多的参数,见 官方网址。
-
Bot基类用于处理上报消息、提供 API 调用接口。Event基类提供了关键信息的方法,如获取事件消息内容。T_State表明了该事件处理状态为 State 类型。State则是 Nonebot2 beta1 版本新添的依赖,T_State必须要陪着一个State。对于我们的例子来说,除了
Bot实际都是可选项,只是提一嘴。
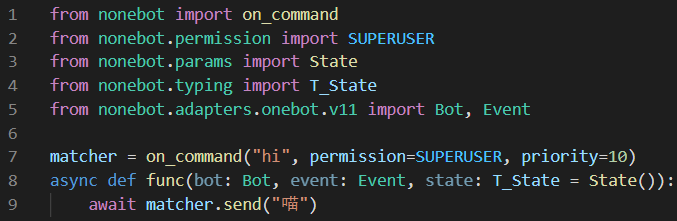
上图便是一个小型插件的完整样貌。
启动机器人,快马加鞭使用大号向机器人账号发送 "hi",便会收获一个你自己写出来的 猫咪女仆 聊天机器人。